TL494 Current-Mode PWM Controller IC
El TL494 es un controlador de modulación de ancho de pulso flexible (PWM) utilizado en electrónica automotriz, industrial y de consumo.Este artículo explora su diseño, incluido el diseño de PIN, las características, la estructura interna y las aplicaciones del mundo real.También analiza cómo el TL494 mejora la confiabilidad del sistema y la eficiencia energética al observar las partes principales como sus amplificadores de doble error, transistores de salida flexibles y oscilador incorporado.Los detalles prácticos, la configuración recomendada y los diagramas de circuito ilustran su utilidad para las necesidades modernas de ingeniería.Catalogar
Figura 1: Serie TL494-TL494CN
¿Cuál es el controlador TL494 PWM?
El TL494 es un circuito integrado utilizado principalmente para administrar la distribución de energía en dispositivos electrónicos a través de un proceso llamado Modulación de ancho de pulso (PWM).Está diseñado para regular las fuentes de alimentación de manera eficiente en varios sistemas.Este chip proporciona todos los componentes necesarios para construir un sistema de control PWM de forma independiente.
El chip contiene varios elementos que aseguran una gestión de energía sin problemas.Incluye dos amplificadores de error que ayudan a corregir las fluctuaciones de voltaje y un oscilador sintonizable que ajusta la frecuencia de la señal PWM.Además, los circuitos incorporados administran el tiempo y regulan la salida, lo que permite que el TL494 ajuste los circuitos de suministro de alimentación en función de las necesidades de rendimiento específicas.
Figura 2: Módulo de controlador PWM TL494
El TL494 ofrece flexibilidad en cómo se emite la potencia.Puede funcionar en configuraciones de punta única y push-pull, asegurando una entrega de energía estable y consistente.Un regulador de voltaje incorporado mantiene una referencia confiable de 5 voltios con una precisión del 5% para un rendimiento constante.
Configuración de pinout TL494
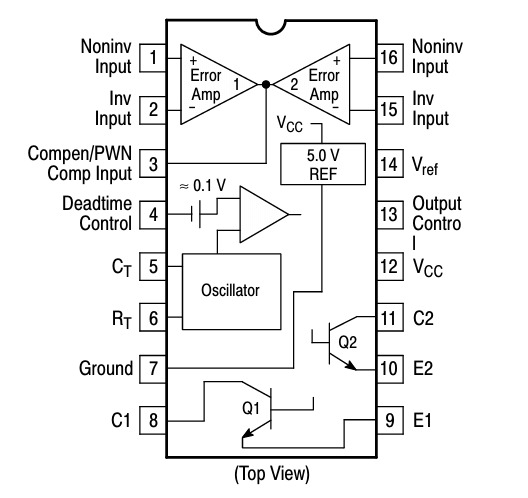
Figura 3: TL494 Pinout
|
Nombre |
Pin No. |
Descripción |
|
1in+ |
1 |
INPUMENTO NO INVERTILLA AL AMPLIFICADOR DE ERROR 1 |
|
1in- |
2 |
Invertir la entrada al amplificador de error 1 |
|
COMENTARIO |
3 |
Pin de entrada para comentarios |
|
DTC |
4 |
Entrada del comparador de control de tiempo muerto |
|
Connecticut |
5 |
Terminal del condensador utilizado para establecer la frecuencia del oscilador |
|
RT |
6 |
Terminal de resistencia utilizado para establecer la frecuencia del oscilador |
|
Gnd |
7 |
Alfiler |
|
C1 |
8 |
El terminal de colección de salida BJT 1 |
|
E1 |
9 |
El terminal emisor de la salida BJT 1 |
|
E2 |
10 |
El terminal emisor de la salida BJT 2 |
|
C2 |
11 |
El terminal de colección de la salida de BJT 2 |
|
VCC |
12 |
Suministro positivo |
|
Salida CTRL |
13 |
Selecciona salida de extremo único/paralelo o operación de pulsación de empuje |
|
ÁRBITRO |
14 |
La salida del regulador de referencia de 5 v |
|
2in- |
15 |
Invertir la entrada al amplificador de error 2 |
|
2in+ |
16 |
INPUTRADO NO INVERTENCIA AL AMPLIFICADOR 2 DE ERROR |
Características del TL494
• Complete el control de PWM: Proporciona características completas para administrar la modulación de ancho de pulso.
• Oscilador incorporado: Viene con un oscilador que puede funcionar en modos maestros y esclavos.
• Amplificadores de error incorporado: Incluye amplificadores para mejorar la retroalimentación y el control.
• Referencia interna de 5V: Tiene una referencia interna de 5V para mantener la operación estable.
• Deadtime ajustable: Le permite ajustar el tiempo muerto para dejar de cambiar de superposición.
• Transistores de salida flexibles: Los transistores de salida pueden manejar hasta 500 mA, dando flexibilidad para varios usos.
• Control de salida para modos: Se puede configurar para la operación Push-Pull o de un solo extremo.
• bloqueo de subvoltaje: Evita que el IC funcione si el voltaje es demasiado bajo para un uso seguro.
• Versión automotriz disponible: Viene en versiones para automóviles y otros usos especiales.
• Opciones sin plomo: Ofrece un empaque sin plomo para un uso más seguro y más ecológico.
Estructura interna del TL494
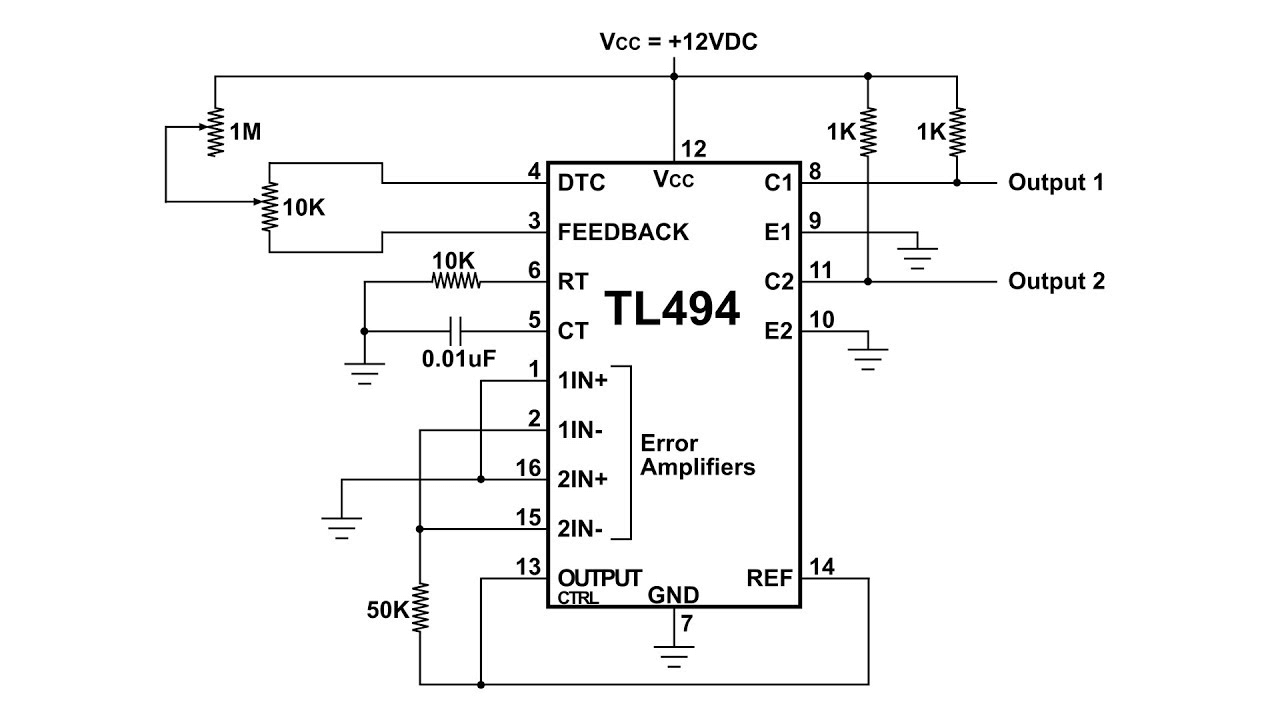
Figura 4: Circuito de control TL494
Amplificadores de error
El TL494 incluye dos amplificadores de error que regulan la salida ajustando su ganancia en respuesta a diferentes condiciones de entrada.Estos amplificadores pueden alimentarse directamente desde el voltaje de suministro, lo que les permite manejar un amplio rango de entrada.Sirven para ajustar la salida PWM, proporcionando corriente estable al entregar potencia solo cuando sea necesario.
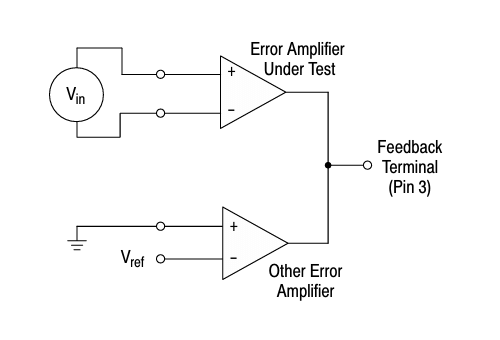
Figura 5: Amplificador de error
Modo de control de salida
El pin de control de salida permite una configuración flexible de los transistores de salida.Puede elegir entre dos modos de funcionamiento: modo de extremo único, donde ambas salidas funcionan simultáneamente, o modo Push-Pull, donde se alternan las salidas.Esta configuración se ajusta sin afectar otros elementos del TL494, como el flip-flop o el oscilador, cambio simple al modo dependiendo de los requisitos de la aplicación.
Transistores de salida
La etapa de salida del TL494 consiste en transistores capaces de cambiar hasta 200 mA de corriente.Estos transistores pueden obtener o hundir la corriente, dependiendo de las necesidades del circuito.En la configuración del emisor común, la caída de voltaje a través del transistor es inferior a 1.3V, mientras que en la configuración del colector común, la caída está por debajo de 2.5V.Este manejo de salida permite que el TL494 conduzca un rango de cargas con una pérdida de potencia mínima.
Fuente de referencia de 5V
El TL494 presenta un voltaje de referencia interno de 5 V que permanece estable siempre que la entrada VCC esté por encima de 7V (dentro de un margen de 100 mV).Este voltaje de referencia está disponible a través del PIN 14, etiquetado Ref.Sirve como una fuente confiable para otras partes del circuito y una operación consistente independientemente de las fluctuaciones en el voltaje de entrada.
Amplificadores operativos
El TL494 está equipado con dos amplificadores operativos que funcionan con un solo riel de suministro.Estos amplificadores están diseñados para funcionar dentro de los límites de voltaje específicos, asegurando que su salida no exceda la capacidad del sistema.Cada amplificador tiene su salida conectada a un diodo, que luego se vincula al pin de comp.Esta disposición permite que el amplificador más activo domine la señal pasada a través del pin de compensación, a su vez controla la siguiente etapa del circuito.
Oscilador de diente de sierra
Una característica del TL494 es su oscilador de diente de sierra incorporado.Este oscilador genera una forma de onda repetitiva que fluctúa entre 0.3V y 3V.Al conectar una resistencia externa (RT) y un condensador (CT), se puede ajustar la frecuencia de esta oscilación.La frecuencia está determinada por la fórmula:
![]()
dónde ![]() se mide en ohmios y
se mide en ohmios y ![]() En Farads.Este oscilador sintonizable forma la base para la sincronización de la modulación de ancho de pulso (PWM).
En Farads.Este oscilador sintonizable forma la base para la sincronización de la modulación de ancho de pulso (PWM).
Disparador de modulación de ancho de pulso
El disparador de modulación de ancho de pulso (PWM) se basa en la interacción entre el borde que cae de la salida del comparador y el oscilador de diente de sierra.A medida que la salida del comparador pasa, el desencadenante activa o desactiva una de las etapas de salida, dependiendo de las condiciones establecidas por el comparador y la forma de onda de diente de sierra.
Funcionalidad de comparación
El comparador en el TL494 compara la señal de entrada, alimentada desde los amplificadores operativos a través del pin de compens, con la forma de onda del oscilador de diente de sierra.Cuando el voltaje de diente de sierra excede la entrada del comparador, la salida del comparador se conduce baja (0).Cuando la entrada es más alta que el voltaje de diente de sierra, la salida se conduce alta (1).
Control de tiempo muerto
El PIN 4, controlado con control de tiempo muerto (DTC), es responsable de establecer un tiempo de apagado mínimo entre pulsos.Este tiempo muerto limita el ciclo de trabajo máximo a aproximadamente 45%, o 42% si el pin DTC está conectado a tierra.Al ajustar el voltaje en este pasador, la duración del período tranquilo entre los eventos de conmutación se controla, y el sistema no excesiva los componentes.
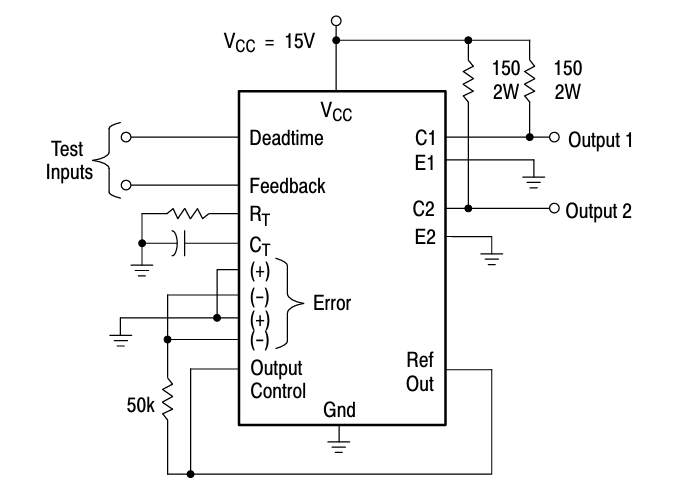
Figura 6: Circuito de control de retroalimentación y tiempo de retroalimentación
Especificaciones del TL494
|
Presupuesto |
Valor |
|
Rango de voltaje de funcionamiento |
7V a 40V |
|
Número de salidas |
2 salidas |
|
Frecuencia de conmutación |
300 kHz |
|
Ciclo de trabajo máximo |
45% |
|
Voltaje de salida |
40V |
|
Corriente de salida |
200 MA |
|
Corriente de salida máxima para ambos PWM |
250 Ma |
|
Rango de temperatura |
-65 ° C a 150 ° C |
|
Tiempo de caída |
40 ns |
|
Tiempo de elevación |
100 ns |
|
Paquetes disponibles |
PDIP de 16 pines, TSSOP,
Soic, SOP
|
TL494 Condiciones de funcionamiento recomendadas
|
Características |
Símbolo |
Mínimo |
Típico |
Máximo |
Unidad |
|
Voltaje de la fuente de alimentación |
VCC |
7 |
15 |
40 |
V |
|
Voltaje de salida del colector |
VC1VC2 |
30 |
40 |
V |
|
|
Corriente de salida del colector (Cada transistor) |
IC1, IC2 |
200 |
mamá |
||
|
Voltaje de entrada amplificado |
Ven |
-0.3 |
|
VCC - 2.0 |
V |
|
Actual en la terminal de retroalimentación |
Ipensión completa |
0.3 |
mamá |
||
|
Corriente de salida de referencia |
Iárbitro |
10 |
mamá |
||
|
Resistencia de tiempo |
RiñonalT |
1.8 |
30 |
500 |
kΩ |
|
Condensador de tiempo |
doT |
0.0047 |
0.001 |
10 |
µF |
|
Frecuencia del oscilador |
Foscuro |
1 |
40 |
200 |
khz |
Calificaciones máximas del TL494
|
Clasificación |
Símbolo |
Valor |
Unidad |
|
Voltaje de la fuente de alimentación |
VCC |
42 |
V |
|
Voltaje de salida del colector |
VC1VC2 |
42 |
V |
|
Corriente de salida del colector (cada transistor) |
IC1, IC2 |
500 |
mamá |
|
Rango de voltaje de entrada del amplificador |
VIR |
-0.3 a +42 |
V |
|
Disipación de potencia tA ≤ 45 ° C |
PAGD |
1000 |
MW |
|
Resistencia térmica, unión a ambiente |
Riñonalθja |
80 |
° C/W |
|
Temperatura de unión operativa |
TJ |
125 |
° C |
|
Rango de temperatura de almacenamiento |
Tstg |
-55 a +125 |
° C |
|
Rango de temperatura ambiente operativa TL494B TL494C Tl494i Ncv494b |
TA |
-40 a +125 0 a +70 -40 a +85 -40 a +125 |
° C |
|
Desarrollar la temperatura ambiente |
TA |
45 |
° C |
Características eléctricas del TL494
|
Características |
Símbolo |
Mínimo |
Típico |
Máximo |
Unidad |
|
Sección de referencia |
|||||
|
Voltaje de referencia (iO = 1.0
mamá) |
Várbitro |
4.75 |
5.0 |
5.25 |
V |
|
Regulación de línea (VCC = 7.0 V
a 40 V) |
Regularlínea |
|
2.0 |
25 |
MV |
|
Regulación de carga (yoO = 1.0 Ma
a 10 mA) |
Regularcarga |
|
3.0 |
15 |
MV |
|
Corriente de salida de cortocircuito (Várbitro
= 0 V) |
ICAROLINA DEL SUR |
15 |
35 |
75 |
mamá |
|
Sección de salida |
|||||
|
Actual de coleccionista fuera del estado (VCC = 40 V, VCeñudo = 40 V) |
Ido(apagado) |
|
2.0 |
100 |
ua |
|
Corriente de emisor fuera del estado VCC = 40 V, Vdo = 40 V, Vmi = 0 V) |
Imi(apagado) |
|
|
|
ua |
|
Voltaje de saturación del empleador de colector Emisor común (Vmi = 0 V, yodo = 200 mA) Emisor -Follower (Vdo = 15 V, yomi = −200 mamá) |
Vse sentó(DO) Vse sentó(MI) |
|
1.1 1.5 |
1.3 2.5 |
V |
|
Corriente de control de control de salida Estado bajo (Vjefe˂ 0.4 V) Estado alto (Vjefe = Várbitro) |
IOCL IOch |
|
10 0.2 |
- 3.5 |
ua mamá |
|
Tiempo de aumento del voltaje de salida - emisor Emisor - |
Triñonal |
|
100 100 |
200 200 |
ns |
|
Tiempo de caída de voltaje de salida - emisor Emisor - |
TF |
|
25 40 |
100 100 |
ns |
|
Sección del amplificador de error |
|||||
|
Voltaje de compensación de entrada |
VIO |
|
2 |
10 |
MV |
|
Corriente de compensación de entrada |
IIO |
|
5 |
250 |
n / A |
|
Corriente de sesgo de entrada |
IIb |
|
-0.1 |
-1.0 |
ua |
|
Rango de voltaje de modo común de entrada |
VICR |
-0.3
a VCC -2.0 |
V |
||
|
Ganancia de voltaje de bucle abierto |
AVolante |
70 |
95 |
|
db |
|
Frecuencia de crossover de Unity -Gain |
FDO- |
|
350 |
|
khz |
|
Margen de fase en Unity -Gain |
φmetro |
|
65 |
|
deg. |
|
Relación de rechazo de modo común |
CMRR |
65 |
90 |
|
db |
|
Relación de rechazo de la fuente de alimentación |
PSRR |
|
100 |
|
db |
|
Corriente del sumidero de salida |
IO- |
0.3 |
0.7 |
|
mamá |
|
Corriente de fuente de salida |
IO+ + |
2 |
-4 |
|
mamá |
|
Sección del comparador PWM |
|||||
|
Voltaje de umbral de entrada |
VTh |
|
2.5 |
4.5 |
V |
|
Corriente de fregadero de entrada |
II- |
0.3 |
0.7 |
|
mamá |
|
Sección de control de tiempo muerto |
|||||
|
Corriente de sesgo de entrada |
IIB (DT) |
|
−2.0 |
−10 |
|
|
Ciclo de trabajo máximo, cada salida, modo push -pull |
corriente continuamáximo |
45 |
48 45 |
50 50 |
|
|
Voltaje de umbral de entrada (Ciclo de trabajo cero) (Ciclo de trabajo máximo |
Vth |
- 0 |
2.8 - |
3.3 - |
V |
|
Sección de oscilador |
|||||
|
Frecuencia |
Foscuro |
|
40 |
- |
khz |
|
Desviación estándar de la frecuencia |
deoscuro |
|
3.0 |
- |
De % |
|
Cambio de frecuencia con voltaje |
ΔFoscuro (ΔV) |
|
0.1 |
- |
De % |
|
Cambio de frecuencia con la temperatura |
ΔFoscuro (Δt) |
|
- |
12 |
De % |
|
Sección de bloqueo de subvoltaje |
|||||
|
Umbral de giro |
Vth |
5.5 |
6.43 |
7.0 |
V |
¿Cómo usar TL494?
El TL494 es un chip simple pero potente que controla la potencia en los circuitos electrónicos.Para usarlo, primero debe conectar el pasador de tierra a los pines de entrada invertidos, que ayudará al chip a recibir señales para el control.A continuación, conecte los pines de entrada no inversor directamente al pin de voltaje de referencia para proporcionar una referencia de voltaje estable para la comparación.Para configurar aún más el chip, deberá conectar el pin DTC (control de tiempo muerto) y el pin de retroalimentación, para ayudar a controlar la velocidad de conmutación y probar la salida, asegurando que el chip funcione correctamente.Para controlar qué tan rápido se enciende y apaga el TL494, debe conectar un condensador al pin 5 y una resistencia al pin 6, que en conjunto determinan la frecuencia del oscilador.Finalmente, el TL494 incluye un amplificador de error que verifica si el voltaje de salida, típicamente 5V, coincide con el voltaje de referencia.Si no es así, el amplificador ajusta la modulación de ancho de pulso (PWM) para mantener la salida estable.Con esta configuración, puede crear un circuito de prueba básico y usar el TL494 de manera efectiva.
¿Cómo funciona un controlador PWM?
Un controlador PWM (modulación de ancho de pulso) como el TL494 ayuda a controlar la potencia al activar y apagar las señales muy rápidamente.Este proceso le permite controlar cuánta energía se envía a un dispositivo.La característica de este controlador es que puede ajustar cuánto tiempo permanece la señal, llamada "ciclo de trabajo", mientras mantiene la velocidad o la frecuencia de las señales igual.
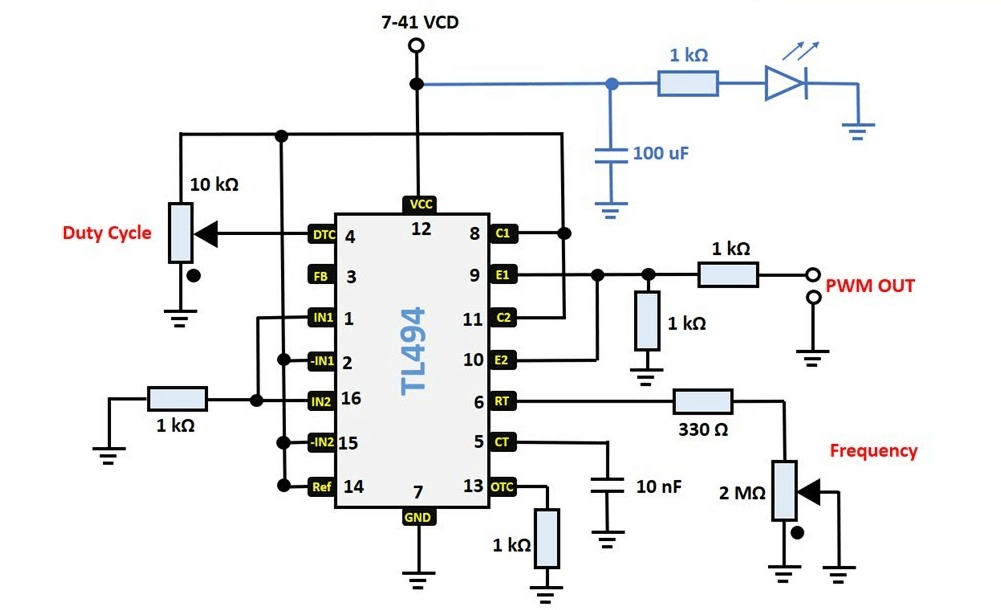
Figura 7: Circuito de control de modulación de ancho de pulso TL494
La mejor parte es que no necesita muchas piezas adicionales para que funcione, solo algunos componentes básicos como resistencias y condensadores.Dentro del controlador, hay algo llamado oscilador que crea un patrón de onda especial, llamado forma de onda de diente de sierra.Esta onda se compara con otras señales de detectores de errores dentro del controlador.
Si la onda de diente de sierra es más alta que la señal de error, el controlador envía una señal para encender la alimentación.Si es más bajo, mantiene la energía.Al hacer esto, el controlador PWM puede controlar cuánta energía se entrega a diferentes partes de un circuito electrónico, lo que lo hace más eficiente.
Frecuencia del oscilador
La frecuencia del oscilador en el chip TL494 afecta cómo se crea la forma de onda (una forma de diente de sierra).Esta forma de onda controla cómo se comportan las salidas PWM (modulación de ancho de pulso) que afecta el rendimiento general del circuito.
La frecuencia se establece seleccionando los valores correctos para dos partes: la resistencia de tiempo (RT) y el condensador de sincronización (CT).Al elegir estas partes, puede controlar la frecuencia para que coincida con lo que necesita.Hay una fórmula simple para esto:
![]()
Puede controlar qué tan rápido se enciende y apaga el controlador PWM cambiando los valores de RT y CT.
Diagrama de circuito TL494
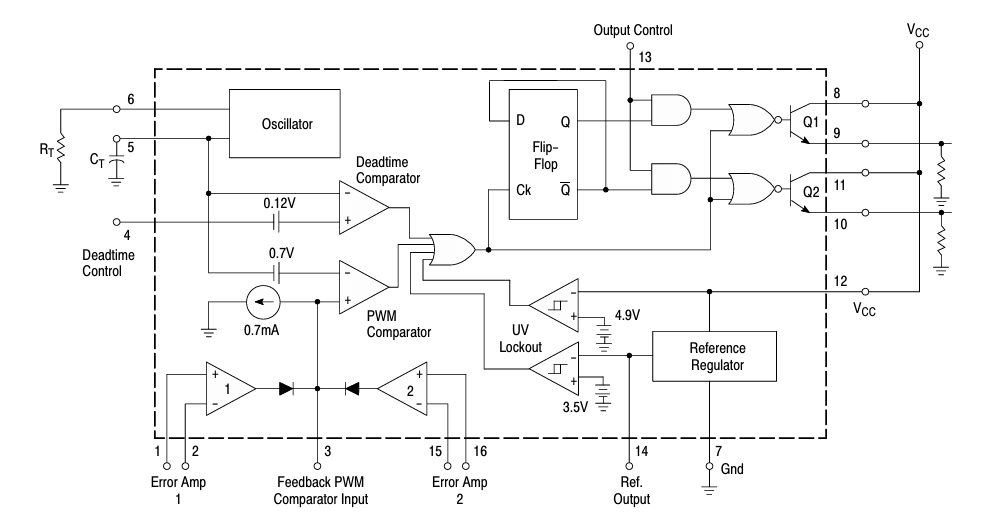
Figura 8: Circuito TL494
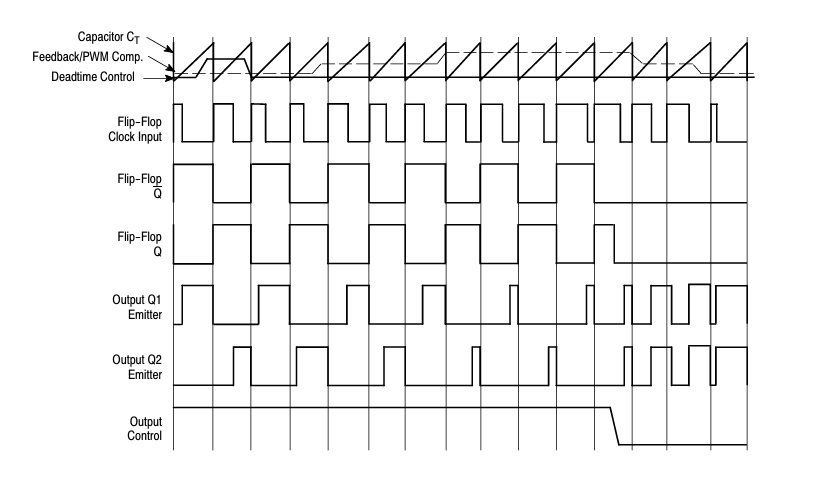
Figura 9: Diagrama de tiempo
Ejemplos de circuitos utilizando el TL494
TL494 cargador solar
Se puede construir un circuito de cargador solar utilizando el TL494 para crear una fuente de alimentación constante de 5V, perfecta para los dispositivos de carga.El circuito funciona a través del control de voltaje y corriente.Asegura que la salida permanezca en un 5V estable, proporcionando a sus dispositivos el voltaje correcto.Regula la corriente para evitar que se vuelva demasiado alto, protegiendo el circuito del daño potencial.Este tipo de cargador se utiliza para aplicaciones con energía solar, lo que ayuda a ahorrar energía y proteger sus dispositivos.
Circuito inversor TL494
Un inversor cambia la alimentación de CC (como desde una batería) en alimentación de CA (como lo que usa en su hogar).El TL494 se puede usar para hacer un circuito de inversor eficiente que proporcione una potencia estable, incluso cuando cambia la carga (los dispositivos conectados).En esta configuración, el TL494 cambia la potencia de un lado a otro rápidamente, haciendo la conversión de DC a AC más suave.Esto es útil en inversores domésticos o sistemas de energía de emergencia.
TL494 DC a DC Converter
Un convertidor de CC a DC toma un voltaje y lo convierte en otro.Por ejemplo, puede usar el TL494 para cambiar 12V DC (como de la batería de un automóvil) a 5V DC, ideal para cargar dispositivos USB.Este circuito tiene varios componentes que contribuyen a su funcionalidad.El circuito de retroalimentación garantiza que el voltaje de salida se mantenga estable, mientras que el control de frecuencia ajusta la velocidad de conmutación para maximizar la eficiencia.El circuito incluye características de protección que lo protegen al evitar el flujo de corriente excesivo y el cierre en caso de sobrecalentamiento.En general, este tipo de circuito es ideal para alimentar pequeños dispositivos electrónicos.
TL494 Drive de frecuencia variable (VFD)
Se utiliza una unidad de frecuencia variable (VFD) para controlar la velocidad de los motores.Con el TL494, puede construir un VFD que ajuste la frecuencia de potencia enviada a un motor, lo que ayuda a funcionar a diferentes velocidades.Esto es bueno para ahorrar energía y extender la vida útil del motor.El TL494 utiliza el control PWM para generar una señal especial que regula la cantidad de potencia enviada al motor.Un sistema de retroalimentación monitorea continuamente el rendimiento del motor y ajusta la energía para garantizar un funcionamiento sin problemas.Los unidades de frecuencia variable (VFD) se emplean en máquinas como cintas transportadoras o ventiladores.
TL494 LED DIMMER
El TL494 también se puede usar para LED tenuees para sistemas de iluminación donde se requiere brillo ajustable.Este circuito se puede usar en casas, automóviles o pantallas.El control de atenuación ajusta el brillo de los LED modificando la señal PWM.La operación suave evita que los LED parpadeen durante el proceso de atenuación, proporcionando una salida consistente y estable.Las características de seguridad incorporadas protegen a los LED del sobrecalentamiento que ayuda a extender su vida útil.Aunque en diseño simple, este tipo de circuito es altamente efectivo para crear sistemas de iluminación de eficiencia energética.
TL494 equivalente y alternativas
El UC3843 y TL3842 son muy similares al TL494 en cómo funcionan.Estos chips a menudo se pueden cambiar en la fuente de alimentación y los diseños de convertidores DC-DC porque sus características de conmutación y diseños de pasadores son compatibles.
Figura 10: Serie UC3843-UC3843N
El UC2842, aunque es similar a otras opciones, se elige para diferentes niveles de voltaje o cuando se requiere un menor consumo de energía.Por otro lado, el SG2524 es otra opción confiable, conocida por su empaque dual en línea y su rendimiento superior en aplicaciones más exigentes.
Figura 11: Serie UC2842-UC2842N
Aplicaciones TL494
• Sistemas de iluminación LED
• Cargadores de batería
• Sistemas de energía automotriz
• Controles de motor industrial
• Sistemas de HVAC
• UPS (fuentes de alimentación ininterrumpidos)
• Electrónica de drones
• Balastos electrónicos para la iluminación
• Sistemas de iluminación de emergencia
• Gestión de energía electrónica de consumo
Paquete TL494
PDIP (paquete de plástico dual en línea): un paquete de orificio a través de los proyectos donde son importantes soldadura y reemplazo de componentes.
SOIC (Circuito integrado de contorno pequeño): un paquete de montaje en superficie diseñado para aplicaciones con restricciones espaciales, que ofrece un factor de forma más compacto.
TSSOP (paquete de esquema pequeño y encogido delgado): otro paquete de montaje en superficie con una huella más pequeña que la SOIC.
SOP (paquete de esquema pequeño): similar al SOIC, pero con ligeras variaciones dimensionales dependiendo del caso de uso específico.
Conclusión
El estudio del circuito integrado TL494 muestra su fuerte influencia en el diseño electrónico en la gestión de energía y los sistemas de control.Su diseño flexible le permite adaptarse para varios usos, desde tareas simples como LED de atenuación hasta trabajos más complejos como el control de los motores industriales.Su capacidad de funcionar bien en condiciones difíciles, gracias a su amplia temperatura y rango de voltaje, se suma a su valor en las aplicaciones exigentes.Los ejemplos y las ideas compartidas aquí muestran tanto la fuerza técnica del TL494 como su papel en impulsar la innovación y la eficiencia en la electrónica.
Preguntas frecuentes [Preguntas frecuentes]
1. ¿Cuál es la función de TL494?
La función primaria TL494 es proporcionar un control preciso de una fuente de alimentación de CC variando la relación de tiempo de activación a apagado en la señal de salida, controlando la cantidad de potencia entregada a una carga.Se utiliza en el cambio de alimentación, convertidores DC-DC y circuitos de control del motor.La experiencia operativa práctica indica que el TL494 es muy favorecido por su flexibilidad en ajustar el ciclo de trabajo y la frecuencia para satisfacer diversas necesidades de aplicación.
2. ¿Cuál es el regulador de corriente constante TL494?
Si bien el TL494 se conoce como controlador PWM, se puede configurar para actuar como un regulador de corriente constante.Esto implica configurar el circuito para entregar una corriente estable independientemente de los cambios en la carga o el voltaje de entrada.Esto es útil en aplicaciones de conducción LED.Los operadores a menudo usan componentes externos como resistencias sensoriales en el circuito de retroalimentación para estabilizar la corriente, asegurando la longevidad y el rendimiento constante de los LED.
3. ¿Cuál es el ciclo de trabajo de TL494?
El ciclo de trabajo del TL494 puede variar del 0% al 100%, aunque prácticamente, a menudo se limita a un máximo de aproximadamente 45% a 90% debido a las limitaciones del circuito interno.El ciclo de trabajo es un parámetro que controla la relación del tiempo "en" hasta el período total de la señal PWM, que afecta el voltaje de salida y la potencia en las aplicaciones.Ajustar el ciclo de trabajo es una tarea común para los técnicos, que podrían usarlo para ajustar la potencia de salida en los suministros de alimentación para que coincidan con los requisitos de carga específicos.
4. ¿Cuál es la frecuencia máxima de TL494?
El TL494 puede funcionar a una frecuencia de conmutación máxima de alrededor de 300 kHz.Esta capacidad de alta frecuencia permite un tamaño más pequeño y un menor costo de componentes pasivos, como inductores y condensadores, que es una ventaja práctica sustancial en los diseños compactos de la fuente de alimentación.Los técnicos a menudo llevan la frecuencia a sus límites superiores en aplicaciones que requieren alimentos compactos y eficientes, equilibrándose entre la eficiencia y las consideraciones de ruido térmico y electrónico.
5. ¿Cuál es la diferencia entre TL494 y KA7500?
El TL494 y KA7500 son similares en funcionalidad, ya que ambos son IC de controladores PWM.Sin embargo, difieren ligeramente en sus características eléctricas y configuración de PIN.Una diferencia práctica es que el KA7500 se cita como una mejor estabilidad a frecuencias más altas.Ambos chips son intercambiables en la mayoría de las aplicaciones, y la elección entre ellos generalmente se reduce a la disponibilidad y las consideraciones de costos.
6. ¿Cuál es el pin de retroalimentación en TL494?
El pin de retroalimentación en el TL494 está implementando voltaje o regulación de corriente.Este pin se utiliza para probar la salida y ajustar el ciclo de trabajo PWM en consecuencia, permitiendo que la salida permanezca dentro de las especificaciones deseadas.Los operadores conectan este PIN a través de una red de resistencias o directamente a un divisor de voltaje o un circuito sensorial de corriente para proporcionar retroalimentación en tiempo real al controlador.Los ajustes a los circuitos de retroalimentación son durante la configuración inicial para calibrar la salida de acuerdo con los requisitos de aplicación específicos.
7. ¿Cuál es la frecuencia de conmutación TL494?
La frecuencia de conmutación del TL494 puede subir a 300 kHz.Esta frecuencia determina qué tan rápido la señal PWM cambia entre sus estados altos y bajos.Establecer la frecuencia de conmutación implica ajustar temporizadores internos o componentes externos que afectan directamente la eficiencia y el rendimiento de toda la fuente de alimentación.