MPU-6050 en acción: Guía práctica para la configuración, la configuración y la gestión de ruido
Catalogar
Introducción a MPU-6050
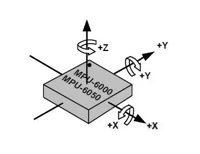
MPU-6050 es el primer componente de procesamiento de movimiento de 6 ejes integrado del mundo, que integra un giroscopio de 3 ejes, un acelerómetro de 3 ejes y un procesador de movimiento digital escalable (DMP).El propósito de usarlo es obtener el ángulo de inclinación del objeto a medir (como un quadcopter, un automóvil de equilibrio) en los ejes X, Y y Z, es decir, el ángulo de tono, el ángulo del rollo y el ángulo de guiñada.Leemos los seis datos del MPU-6050 (valor AD de aceleración de tres ejes y valor AD de velocidad angular de tres ejes) a través de la interfaz I2C.Después del procesamiento de fusión de postura, se pueden calcular los ángulos de tono, rollo y guiñada.Como referencia direccional para los valores de medición, la definición de la dirección de la coordenada del sensor es la que se muestra en la figura a continuación, que sigue el principio del sistema de coordenadas diestro (es decir, el pulgar correcto apunta a la dirección positiva de la x-El eje, el dedo índice apunta a la dirección positiva del eje y, y el dedo medio apunta a la dirección positiva del eje z).
Con su bus de sensor I2C dedicado, el MPU-6050 puede recibir la entrada directamente de una brújula externa de 3 ejes, proporcionando una salida completa de 9 ejes MotionFusion ™.Elimina el problema de discrepancia entre el giroscopio combinado y la línea de tiempo del acelerador y reduce significativamente el espacio de envasado en comparación con las soluciones de múltiples componentes.Cuando está conectado a un magnetómetro de tres ejes, el MPU-60X0 es capaz de proporcionar una salida completa de fusión de movimiento de 9 ejes a su puerto I2C o SPI principal (tenga en cuenta que el puerto SPI solo está disponible en el MPU-6000).
Alternativas y equivalentes
• MPU-3300
• MPU-6000
• MPU-6500
Fabricante de MPU-6050
El fabricante de MPU-6050 es TDK.Después de que los dos fundadores de TDK, el Dr. Yogoro Kato y Takei Takei, inventaron Ferrite en Tokio, fundaron Tokio Denkikagaku Kogyo K.K.en 1935. Como marca global de la industria electrónica, TDK siempre ha mantenido una posición dominante en los campos de materias primas electrónicas y componentes electrónicos.TDK's comprehensive and innovation-driven product portfolio covers passive components such as ceramic capacitors, aluminum electrolytic capacitors, film capacitors, magnetic products, high-frequency components, piezoelectric and protection devices, as well as sensors and sensor systems (such as temperature and pressure,Sensores magnéticos y MEMS), etc. Además, TDK también proporciona alimentación y dispositivos de energía, cabezas magnéticas y otros productos.Sus marcas de productos incluyen TDK, EPCOS, Invensense, Micronas, Tronics y TDK-Lambda.
Diagrama de bloques interno de MPU-6050
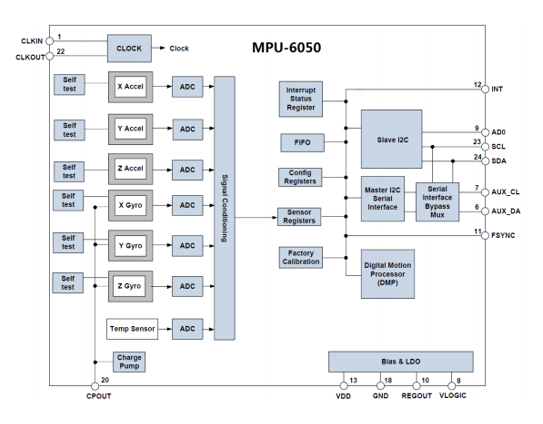
Entre ellos, SCL y SDA son las interfaces IIC conectadas al MCU, y el MCU controla el MPU-6050 a través de esta interfaz IIC.También hay una interfaz IIC, a saber, Aux_Cl y Aux_DA.Esta interfaz se puede utilizar para conectar dispositivos de esclavos externos, como sensores magnéticos, para formar un sensor de nueve ejes.Vlogic es el voltaje del puerto IO.Este pin puede soportar un mínimo de 1.8V.Por lo general, lo conectamos directamente a VDD.AD0 es el pin de control de direcciones de la interfaz Slave IIC (conectada al MCU).Este PIN controla el bit más bajo de la dirección IIC.Si está conectado a GND, la dirección IIC de MPU-6050 es 0x68;Si está conectado a VDD, es 0x69.Tenga en cuenta que la dirección aquí no incluye el bit más bajo de transmisión de datos (el bit más bajo se usa para representar operaciones de lectura y escritura).En el MWBalancedStc15, AD0 está conectado a GND, por lo que la dirección IIC de la MPU-6050 es 0x68 (excluyendo el bit más bajo).
Inicializar la interfaz IIC
MPU-6050 usa IIC para comunicarse con STC15, por lo que debemos inicializar las líneas de datos SDA y SCL conectadas a MPU-6050 primero.
Restablecer MPU-6050
Este paso restaura todos los registros dentro de la MPU-6050 a sus valores predeterminados, que se logra escribiendo 1 a bit 7 del registro de gestión de potencia 1 (0x6b).Después del reinicio, el registro de administración de energía 1 se restaurará al valor predeterminado (0x40), y este registro debe establecerse posteriormente en 0x00 para despertar la MPU-6050 y ponerlo en un estado de trabajo normal.
Establezca el rango a gran escala del sensor de velocidad angular (Gyro) y el sensor de aceleración
En este paso, establecemos el rango de escala completa (FSR) de los dos sensores a través del registro de configuración del giroscopio (0x1b) y el registro de configuración del sensor de aceleración (0x1c) respectivamente.Típicamente, establecemos el rango a gran escala del giroscopio en ± 2000dps y el rango de escala completa del acelerómetro a ± 2g.
Establecer otros parámetros
Aquí, también necesitamos configurar los siguientes parámetros: desactivar las interrupciones, deshabilitar la interfaz Aux I2C, deshabilitar FIFO, establecer la velocidad de muestreo de giroscopio y configurar el filtro de paso bajo digital (DLPF).Como no utilizamos interrupciones para leer datos en este capítulo, la función de interrupción debe desactivarse.Al mismo tiempo, dado que no estamos utilizando la interfaz Aux I2C para conectar otros sensores externos, también necesitamos cerrar esta interfaz.Estas funciones se pueden controlar a través del registro de Interruption Habilitar (0x38) y el registro de control de usuario (0x6a).MPU-6050 puede usar FIFO para almacenar datos del sensor, pero no lo hemos usado en este capítulo, por lo que todos los canales FIFO deben cerrarse.Esto se puede controlar a través del registro de habilitación FIFO (0x23).Por defecto, el valor de este registro es 0 (es decir, FIFO está deshabilitado), por lo que podemos usar el valor predeterminado directamente.La velocidad de muestreo del giroscopio se controla mediante el registro de divisor de la tasa de muestreo (0x19).Normalmente, establecemos esta velocidad de muestreo en 50. La configuración del filtro de paso bajo digital (DLPF) se completa a través del registro de configuración (0x1a).En términos generales, estableceremos DLPF en la mitad del ancho de banda para equilibrar la precisión de los datos y la velocidad de respuesta.
Configure la fuente del reloj del sistema y habilite el sensor de velocidad angular y el sensor de aceleración
La configuración de la fuente del reloj del sistema depende del registro de administración de potencia 1 (0x6b), donde los tres bits más bajos de este registro determinan la selección de la fuente del reloj.Por defecto, estos tres bits se establecen en 0, lo que significa que el sistema utiliza el oscilador RC interno de 8MHz como fuente del reloj.Sin embargo, para mejorar la precisión del reloj, a menudo lo establecemos en 1 y seleccionamos el giroscopio del eje x como la fuente del reloj.Además, habilitar el sensor de velocidad angular y el sensor de aceleración también es un paso importante en el proceso de inicialización.Ambas operaciones se implementan a través del Registro de Gestión de Power 2 (0x6c).Simplemente establezca el bit correspondiente en 0 para activar el sensor correspondiente.Después de completar los pasos anteriores, el MPU-6050 puede ingresar el estado de trabajo normal.Los registros que no están especialmente establecidos adoptarán los valores predeterminados preestablecidos por el sistema.
¿Cómo funciona el MPU-6050?
Sensor de giroscopio
El sensor está equipado con un giroscopio en el interior, que siempre permanecerá paralelo a la dirección inicial debido al efecto giroscópico.Por lo tanto, podemos calcular la dirección y el ángulo de rotación detectando la desviación del gyro desde la dirección inicial.
Sensor de acelerómetro
Un sensor de acelerómetro es un dispositivo que puede medir la aceleración y funciona en función del principio del efecto piezoeléctrico.Durante la aceleración, el sensor mide la fuerza inercial aplicada al bloque de masa y luego calcula el valor de aceleración utilizando la segunda ley de Newton.
Procesador de movimiento digital (DMP)
El DMP es un módulo de procesamiento de datos en el chip MPU6050 que tiene un algoritmo de filtrado Kalman incorporado para adquirir datos de los sensores de giroscopio y acelerómetro y procesar los cuaternos de salida.Esta característica reduce en gran medida la carga de trabajo del microprocesador periférico y evita el tedioso proceso de filtrado y fusión de datos.
Notas:
Quaternions: los cuaterniones son números supercomplexos simples.Los números complejos están compuestos de números reales más la unidad imaginaria I, donde i^2 = -1.
¿Dónde se usa MPU-6050?
• juguetes
• Purle y juegos portátiles
• Controladores de juegos basados en el movimiento
• Tecnología Blurfree ™ (para estabilización de imágenes de video/todavía imagen)
• Tecnología AirSign ™ (para seguridad/autenticación)
• Reconocimiento de gestos InstanteGesture ™ IG ™
• Sensores portátiles para la salud, el estado físico y los deportes
• Marco de aplicaciones y juegos habilitados para el movimiento
• Tecnología MotionCommand ™ (para atajos de gestos)
• Servicios basados en la ubicación, puntos de interés y cálculo muerto
• Controles remotos 3D para DTV conectados a Internet y cajas establecidas, ratones 3D
• Tecnología TouchanyWhere ™ (para el control/navegación de aplicaciones de la interfaz de usuario "no touch")
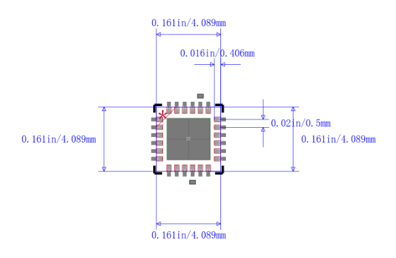
Paquete de MPU-6050
¿Cómo reducir el ruido de MPU-6050?
Podemos tomar las siguientes formas de reducir el ruido de MPU-6050:
Use sensores calibrados: la calibración del acelerómetro y el giroscopio del MPU-6050 puede eliminar el sesgo y el error de los sensores mismos, reduciendo así el efecto del ruido.El proceso de calibración generalmente consta de dos etapas: calibración estática y calibración de movimiento.
Proceso de filtrado de hardware: agregar condensadores de filtro a la línea de alimentación de MPU-6050 puede reducir el impacto del ruido de la fuente de alimentación en el sensor.Mientras tanto, durante el diseño de PCB, debemos intentar mantener MPU-6050 lejos de las posibles fuentes de interferencia, como las líneas de señal de alta frecuencia y los componentes de alta potencia.
Procesamiento de filtrado de software: después de recopilar los datos sin procesar de MPU-6050, podemos agregar un enlace de filtrado de software para preprocesar los datos iniciales para eliminar la interferencia inducida por el ruido.Los métodos de filtrado de software de uso común incluyen filtrado medio, filtrado mediano, filtrado de Kalman, etc.
Use un filtro interno de paso bajo: MPU-6050 tiene un filtro de paso bajo integrado interno, que puede usarse para reducir el ruido de alta frecuencia al establecer su frecuencia de corte.Específicamente, podemos establecer la frecuencia de corte del filtro digital modificando el registro de configuración del MPU-6050 para eliminar el ruido de alta frecuencia causado por el muestreo A/D.
Cálculo de trayectoria de movimiento basado en MPU-6050
El MPU-6050 es un sensor de acelerómetro y giroscopio de seis ejes que se puede usar para medir el movimiento y la actitud de los objetos.El cálculo de la trayectoria de movimiento basado en MPU-6050 puede realizarse mediante los siguientes pasos:
El primer paso es leer los datos del sensor.Necesitamos leer los datos de acelerómetro y giroscopio de los sensores MPU-6050 utilizando controladores y funciones de biblioteca apropiadas.Estos datos generalmente se producen en un formato digital, por lo que se requiere algunos trabajos de conversión y calibración para convertirlos en mediciones reales en unidades físicas.
El segundo paso es calcular la aceleración.Primero, necesitamos procesar los datos del acelerómetro para derivar la aceleración del objeto en cada eje.Posteriormente, para calcular la velocidad y el desplazamiento del objeto en cada eje, necesitamos integrar los datos de aceleración.Las técnicas de integración numérica, como el método de Euler o el método Lunger-Kutta, a menudo se utilizan en este proceso para garantizar la precisión de los cálculos de desplazamiento.
El tercer paso es calcular la velocidad angular.Usando datos de giroscopio, se puede calcular la velocidad angular del objeto en cada eje.Nuevamente, estos datos deben calibrarse y convertirse para obtener la velocidad angular en las unidades físicas reales.
El cuarto paso es calcular la rotación.Al integrar los datos de velocidad angular, se puede calcular el ángulo de rotación del objeto en cada eje.Esto se puede hacer utilizando técnicas de integración numérica como el método de Euler o el método Longge-Kutta para calcular el ángulo.
El quinto paso es fusionar los datos.Combinamos los datos de acelerómetros y giroscopios para obtener la actitud completa y la información de posición del objeto.Esto se puede hacer utilizando algoritmos como solucionador de actitud basado en cuaternión o solucionador de ángulo de Euler.
El sexto paso es visualizar los resultados.Convertimos la trayectoria de movimiento del objeto calculado en un conjunto de puntos en un sistema de coordenadas 3D y la mostramos utilizando herramientas de visualización apropiadas para una comprensión más intuitiva de la trayectoria de movimiento del objeto y los cambios de actitud.
Preguntas frecuentes [Preguntas frecuentes]
1. ¿Qué tan preciso es MPU6050?
Los resultados adquiridos mostraron una precisión suficiente de menos del 1 % y la confiabilidad, asegurando el dimensionamiento adecuado del eje del ascensor y los altos estándares de la industria del ascensor.
2. ¿Cómo leer datos de MPU6050?
Para leer los registros MPU6050 internos, el maestro envía una condición de inicio, seguida de la dirección de esclavo I2C y un bit de escritura, y luego la dirección de registro que se lee.
3. ¿Dónde se usa MPU6050?
En el seguimiento de la salud portátil, los dispositivos de seguimiento de fitness.En drones y quadcopters, MPU6050 se usa para el control de posición.Utilizado para controlar el brazo robótico.Dispositivos de control de gestos de mano.
4. ¿Es MPU6050 una IMU?
El bloque de sensor MPU6050 IMU lee datos del sensor MPU-6050 que está conectado al hardware.El bloque produce aceleración, velocidad angular y temperatura a lo largo de los ejes del sensor.
5. ¿Cuál es el procesamiento de MPU6050?
Este es el procesador a bordo del MPU6050 que combina los datos provenientes del acelerómetro y el giroscopio.El DMP es la clave para usar el MPU6050 y se explica en detalle más adelante.Al igual que con todos los microprocesadores, el DMP necesita firmware para ejecutarse.
Acerca de nosotros
ALLELCO LIMITED
Lee mas
Consulta rápida
Envíe una consulta, responderemos de inmediato.

Guía en profundidad para LM317: Comprensión de los reguladores de voltaje ajustable
en 03/09/2024
Comprensión del TL431: una guía completa de los reguladores de derivación de precisión
en 03/09/2024
Publicaciones populares
-
¿Qué es GND en el circuito?
en 01/01/1970 3108
-

Guía del conector RJ-45: códigos de color del conector RJ-45, esquemas de cableado, aplicaciones R-J45, hojas de datos RJ-45
en 01/01/1970 2672
-
Comprensión de los voltajes de la fuente de alimentación en Electronics VCC, VDD, VEE, VSS y GND
en 15/11/0400 2211
-

Tipos de conector de fibra: SC vs LC y LC vs MTP
en 01/01/1970 2182
-

Comparación entre DB9 y RS232
en 01/01/1970 1802
-

¿Qué es una batería LR44?
La electricidad, esa fuerza ubicua, impregna en silencio todos los aspectos de nuestra vida diaria, desde dispositivos triviales hasta equipos médicos potencialmente mortales, juega un papel silencioso.Sin embargo, realmente comprender esta energía, especialmente cómo almacenarla y producirla de manera eficiente, no es una tarea fácil.Es en este fondo que este artículo se centrará en un tipo...en 01/01/1970 1774
-
Comprender los fundamentos: resistencia a la inductancia y capacidad
En la intrincada danza de la ingeniería eléctrica, un trío de elementos fundamentales toma el centro del escenario: inductancia, resistencia y capacitancia.Cada uno tiene rasgos únicos que dictan los ritmos dinámicos de los circuitos electrónicos.Aquí, nos embarcamos en un viaje para descifrar las complejidades de estos componentes, para descubrir sus distintos roles y usos prácticos dentr...en 01/01/1970 1728
-

Guía integral de batería CR2430: especificaciones, aplicaciones y comparación con las baterías CR2032
¿Qué es la batería CR2430?Beneficios de las baterías CR2430NormaAplicaciones de batería CR2430CR2430 equivalenteCR2430 vs CR2032Batería CR2430 TamañoQué buscar al comprar el CR2430 y los equivalentesHoja de datos pdfPreguntas frecuentes Las baterías son el corazón de pequeños dispositivos electrónicos.Entre los muchos tipos disponibles, las células de monedas juegan un papel crucial, ...en 01/01/1970 1673
-
¿Qué es RF y por qué lo usamos?
La tecnología de radiofrecuencia (RF) es una parte clave de la comunicación inalámbrica moderna, lo que permite la transmisión de datos a largas distancias sin conexiones físicas.Este artículo profundiza en los conceptos básicos de RF, explicando cómo la radiación electromagnética (EMR) hace posible la comunicación de RF.Exploraremos los principios de EMR, la creación y el control de l...en 01/01/1970 1670
-
Guía completa de HFE en transistores
Los transistores son componentes cruciales en dispositivos electrónicos modernos, lo que permite la amplificación y el control de la señal.Este artículo profundiza en el conocimiento que rodea HFE, incluida cómo seleccionar el valor de HFE de un transistor, cómo encontrar HFE y la ganancia de diferentes tipos de transistores.A través de nuestra exploración de HFE, obtenemos una comprensió...en 15/11/5600 1632
Número de pieza caliente
-

74438324056
Würth Elektronik
FIXED IND 5.6UH 950MA 465MOHM SM
VT2492FC-ADJ
Analog Devices Inc./Maxim Integrated
IC REG LINEAR SMD
IRFB9N65APBF
Vishay Siliconix
MOSFET N-CH 650V 8.5A TO220AB
NCP1400ASN25T1G
onsemi
IC REG BOOST 2.5V 80MA 5TSOP
SN74ABT241ADW
Texas Instruments
IC BUF NON-INVERT 5.5V 20SOIC
MAX4786EXS+T
Analog Devices Inc./Maxim Integrated
IC CURRENT LIMITING SC70-4
TRF7964ARHBR
Texas Instruments
IC RFID READER 13.56MHZ 32VQFN
MAX810TTRG
onsemi
IC SUPERVISOR 1 CHANNEL SOT23-3
PIC24FJ64GA002T-I/ML
Microchip Technology
IC MCU 16BIT 64KB FLASH 28QFN
TSX3702IPT
STMicroelectronics
IC COMPARATOR 2 CMOS 8TSSOP
GRM1555C1E9R4CZ01D
Murata Electronics
CAP CER 9.4PF 25V C0G/NP0 0402
GRM0336S1E6R4DD01D
Murata Electronics
CAP CER 6.4PF 25V S2H 0201
ADS8860IDGS
Texas Instruments
IC ADC 16BIT SAR 10VSSOP
1N4764A-TAP
Vishay General Semiconductor - Diodes Division
DIODE ZENER 100V 1.3W DO41
XTR104AU
Burr Brown
INSTRUMENTATION AMPLIFIER
71V65603S100BG
Renesas Electronics America Inc
IC SRAM 9MBIT PAR 119PBGA
CY2305CSXI-1T
Infineon Technologies
IC FANOUT BUFFER 8SOIC
R5F100MJAFB#10
Renesas Electronics America Inc
IC MCU 16BIT 256KB FLASH 80LFQFP -

AO4627
Alpha & Omega Semiconductor Inc.
MOSFET N/P-CH 30V 8SOIC
MC10H643FNR2
onsemi
IC CLK BUFFER 1:8 80MHZ 28PLCC
R6047ENZ1C9
Rohm Semiconductor
MOSFET N-CH 600V 47A TO247
LT1950IGN#TRPBF
Analog Devices Inc.
IC REG CTRLR MULT TOP 16SSOP
AP432YL-13
Diodes Incorporated
IC VREF SHUNT ADJ 1% SOT89-3
TPS22902YFPR
Texas Instruments
IC PWR SWITCH P-CHAN 1:1 4DSBGA
SI4636DY-T1-E3
Vishay Siliconix
MOSFET N-CH 30V 17A 8SO
1SC0450E2B0-65
Power Integrations
IC GATE DRVR HI/LOW SIDE MODULE
BD5460GUL-E2
Rohm Semiconductor
IC AMP CLASS D MONO 850MW 9VCSP
ICS1893AF
Renesas Electronics America Inc
IC CONTROLLER ETHERNET 48SSOP
SPC5642AF2MLU1
Freescale Semiconductor
IC MCU 32BIT 2MB FLASH 176LQFP
1SMA5939BT3
onsemi
DIODE ZENER 39V 1.5W SMA
AD1849JP
Analog Devices Inc.
16-BIT SOUNDCOMM CODEC
NCP4680DSQ12T1G
onsemi
IC REG LINEAR 1.2V 150MA SC88A
100112DC
Texas Instruments
INVERTER/BUFFER, 100K SERIES
EC31QS03L
KYOCERA AVX
DIODE SCHOTTKY 30V 3A DO214AC
AMC7832IPAPR
Texas Instruments
IC ANLG MON/CTL 12B 87K 64HTQFP
93LC46B/SN
Microchip Technology
IC EEPROM 1KBIT MICROWIRE 8SOIC -

V24B48H200BL2
Vicor Corporation
DC DC CONVERTER 48V 200W
EP1M120F484C6
Intel
IC FPGA 303 I/O 484FBGA
DRV8825PWP
Texas Instruments
IC MTR DRVR BIPLR 8.2-45V 28SSOP
08051A270GAT4A
KYOCERA AVX
CAP CER 27PF 100V C0G/NP0 0805
H5N5005PL-E
Renesas Electronics America Inc
N-CHANNEL POWER MOSFET
MUN5213DW1T1G
onsemi
TRANS PREBIAS 2NPN 50V SC88
SRP1265A-4R7M
Bourns Inc.
FIXED IND 4.7UH 13.5A 8.4MOHM SM
CHS-02TB
Nidec Components Corporation
SWITCH SLIDE DIP SPST 100MA 6V
142138
Amphenol RF
CONN SMB JACK STR 50 OHM PCB
74VHCT04AN
Fairchild Semiconductor
IC INVERTER 6CH 1-INP 14DIP
2DA1213O-13
Diodes Incorporated
TRANS PNP 50V 2A SOT89-3
SN74HCT32PWRG4
Texas Instruments
IC GATE OR 4CH 2-INP 14TSSOP
TC7126ACPL
Microchip Technology
IC DRVR 7 SEG 3 1/2 DIGIT 40DIP
SP3220EBCY-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 1/1 16TSSOP
LT1580CT#PBF
Linear Technology
LT1580 - 7A LOW DROPOUT HS VOLT
LM339PWR
Texas Instruments
IC COMPARATOR 4 DIFF 14TSSOP
LMV711IDBVRG4
Texas Instruments
IC OPAMP GP 1 CIRCUIT SOT23-6
CD4027BE
Texas Instruments
IC FF JK TYPE DUAL 1BIT 16DIP