Controladores de motor L298N: Características, diagramas de circuito y aplicaciones
Catalogar
Introducción a L298N
L298N es una versión de paquete vertical de L298.Es un chip de controlador de motor de puente completo de doble canal que puede aceptar alto voltaje y alta corriente.Su voltaje de trabajo puede alcanzar 46V, y su corriente de salida máxima es de 4A.Además, L298N también tiene dos terminales de control de habilitación.Estos terminales de control permiten que el modo de trabajo del circuito se ajuste dinámicamente enchufando y desconectando el puente de entrada sin ser interferido con la señal de entrada.El L298N está equipado con una entrada de potencia lógica, que permite que la porción del circuito lógico interno funcione a bajo voltaje.Al mismo tiempo, también puede generar un voltaje lógico de 5V externamente.Para evitar daños al chip de estabilización de voltaje, cuando se usa un voltaje de conducción superior a 12V, se recomienda utilizar una interfaz externa de 5 V para una fuente de alimentación independiente.
L298N controla el terminal de entrada de E/S en el chip de control principal y ajusta el voltaje de salida directamente a través de la fuente de alimentación para realizar el avance, el reverso y la parada del motor.Normalmente, L298N puede impulsar directamente los relés (cuatro vías), solenoides, válvulas solenoides, dos motores de CC y un motor paso a paso (dos fases o cuatro fases).
Alternativas y equivalentes:
• E-L298N
• L298HN
• LM18298T
Características funcionales de L298N
Compatibilidad de entrada lógica: la entrada lógica de L298N es compatible con TTL, CMOS y otros niveles lógicos.
Protección de sobrecalentamiento: L298N tiene una función de protección de sobrecalentamiento.Cuando la temperatura del chip es demasiado alta, desconectará automáticamente la salida.
Diodo de polaridad libre incorporado: L298N tiene un diodo de polaridad libre incorporado, que se puede usar para frenar los motores de CC.
Salida de corriente grande: L298N puede proporcionar una corriente de salida grande y es adecuada para algunas aplicaciones que requieren una corriente de conducción grande.
Estructura doble de puente H: L298N integra una estructura doble de puente H, que puede controlar la dirección y la velocidad de dos motores de CC o motores paso a paso.
Diagrama de circuito L298N
El diagrama de circuito de L298N es el siguiente:
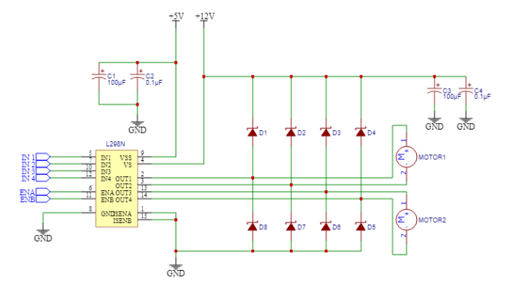
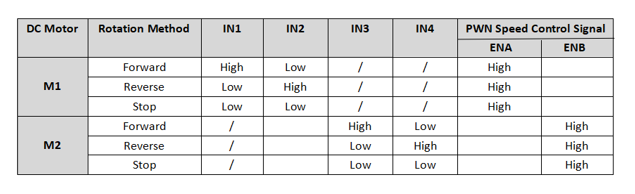
Out1, out2 y out3, out4 están conectados al motor1, motor2;In1, in2, in3, in4 pines del microcontrolador para acceder al nivel de control, para controlar el motor hacia adelante y hacia atrás;ENA, ENB conectado al control del terminal de habilitación, para controlar la velocidad del motor.El diagrama de relación lógica de control L298N es el siguiente:
Con respecto a la regulación de la velocidad del motor, hemos adoptado el método de regulación de velocidad PWM.El principio radica en realizar la regulación de la velocidad controlando el tiempo de conducción T del tubo de conmutación en un ciclo.El voltaje promedio U a través del motor durante un ciclo completo T se puede expresar como U = VCC × (t/t) = A × VCC.Donde, a = t/t, se conoce como ciclo de trabajo y VCC representa el voltaje de suministro.La velocidad del motor es proporcional al voltaje a través del motor, mientras que el voltaje a través del motor es proporcional al ciclo de trabajo de la forma de onda de control.Por lo tanto, existe una relación proporcional entre la velocidad del motor y el ciclo de trabajo: cuanto mayor sea el ciclo de trabajo, más rápida es la velocidad del motor.
Método de control de L298N
Cuando usamos L298N, necesitamos ingresar señales de control a IN1, IN2, IN3 e IN4 para controlar la rotación y la velocidad del motor hacia adelante e inversa del motor.Aquí hay varios métodos de control:
Modo de control PWM
El modo PWM puede controlar efectivamente la velocidad del motor.Cuando usamos el modo PWM, necesitamos usar los dos pines EN1 y EN2 para ajustar la velocidad del motor.Específicamente, cuando los pines EN1 y EN2 están en alto nivel, el motor funcionará normalmente;Cuando están en un nivel bajo, el motor dejará de girar.
Modo de control unidireccional
Cuando IN1, IN2, IN3 e IN4 son de alto nivel al mismo tiempo, el motor gira hacia adelante;Cuando dos puertos de entrada son de alto nivel y los otros dos puertos de entrada son de bajo nivel, el motor gira reversamente.
Modo de control bidireccional
Cuando se usa el modo de control bidireccional, IN1 e IN2 son responsables de controlar el motor 1, mientras que IN3 e IN4 son responsables de controlar el motor 2. Específicamente, cuando IN1 es de alto nivel e IN2 es de bajo nivel, el motor 1 girará hacia adelante;Por el contrario, cuando IN1 es bajo de nivel y IN2 es de alto nivel, el motor 1 girará reversamente.De la misma manera, la lógica de control de IN3 e IN4 también es aplicable al control de rotación hacia adelante e inversa del motor 2.
Diagrama y funciones de PIN de L298N
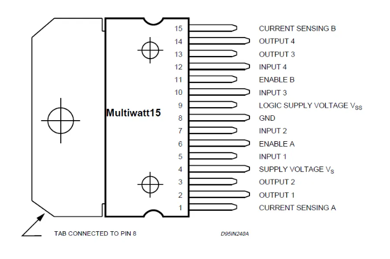
Alfiler
VS: entrada de voltaje de suministro (hasta 46 V)
GND: Pin de tierra
Pin de control lógico
In1, in2: utilizado para controlar la dirección de rotación del motor 1
In3, in4: utilizado para controlar la dirección de rotación del motor 2
Pin de control del motor:
Out1, out2: utilizado para controlar la dirección del motor 1
Out3, out4: utilizado para controlar la dirección del motor 2
ENA: Habilitar PIN, utilizado para controlar la velocidad del motor 1
ENB: Habilitar PIN, utilizado para controlar la velocidad del motor 2
¿Cómo usar L298N?
Conecte la fuente de alimentación: la fuente de alimentación del módulo del controlador L298N debe mantenerse en el rango de 12V a 35V.En aplicaciones prácticas, para garantizar la estabilidad de la fuente de alimentación, es posible que también necesitemos filtrar la fuente de alimentación.
Conecte los motores: conectamos los dos motores a los pines de salida del L298N a través del controlador, y el nivel de control se ingresa directamente al motor a través del L298N.
Control L298N: Utilizamos el puerto de control (habilitar, el pin de control) para controlar el L298N.Necesitamos establecer el estado del puerto de habilitación y el pin de control al asignar valores.Estos estados determinarán el estado de nivel de la salida L298N.Al cambiar estos estados, podemos controlar de manera efectiva la rotación y la velocidad de avance y inversa del motor.
¿Cómo usar PWM para regular la velocidad del motor?
Si queremos usar PWM para regular la velocidad del motor, tenemos dos métodos de cableado:
Método de cableado uno (recomendado):
Eliminamos la tapa del puente entre el canal Activo y las 5V, conectamos el pin de habilitación al pin PWM de Arduino y conectamos los pines 1 y 2 a los dos pines normales de Arduino.De esta manera, podemos controlar el interruptor del canal a través del pasador PWM para ajustar la velocidad del motor;Al controlar el estado de nivel de los pines 1 y 2, podemos controlar la dirección de rotación del motor.Esta forma de cableado solo requiere el uso de un pasador PWM por canal, pero ocupa dos pines normales.Por lo tanto, en aplicaciones prácticas, necesitamos sopesar y elegir entre múltiples métodos de cableado basados en la cantidad de pines disponibles en el Arduino.
Método de cableado dos (no recomendado):
No eliminamos el puente entre el canal Enable y 5V, por lo que el canal permanecerá continuamente abierto.Luego, conectamos los pines 1 y 2 a las dos interfaces PWM de Arduino respectivamente.Al controlar las salidas correspondientes a estos dos pines respectivamente, podemos controlar la dirección y la velocidad de rotación del motor.Obviamente, este método de cableado ocupará más pines PWM, porque cada canal requiere dos pines PWM para controlar.Sin embargo, este método no ocupa ningún alfiler común.Por lo tanto, no recomendamos usar este esquema de cableado cuando los recursos PWM PIN están apretados.
¿Dónde se usa L298N?
Vehículos eléctricos: L298N se puede usar para controlar los motores de accionamiento en vehículos eléctricos, como bicicletas eléctricas, scooters, etc. Por ejemplo, en bicicletas, controlando con precisión la velocidad de rotación y la dirección del motor, L298N puede lograr la aceleración, desaceleración yConducción estable de bicicletas eléctricas.El jinete puede transmitir instrucciones al L298N operando el mango o los botones, controlando así la salida del motor para hacer que la bicicleta acceda de acuerdo con los deseos del conductor.
Equipo industrial automatizado: en el campo de la automatización industrial, L298N se puede utilizar para controlar los motores de varios equipos industriales, como las cintas transportadoras, las armas robóticas, los robots industriales, etc. Por ejemplo, en el brazo robótico, el L298N controla con precisión elEl ángulo de rotación y la velocidad del motor, lo que permite que el brazo robótico se mueva de acuerdo con una trayectoria predeterminada y logre una operación de alta precisión.Esto no solo mejora la eficiencia de producción, sino que también reduce las pérdidas de producción causadas por errores operativos.
Tecnología del robot: L298N a menudo se usa en proyectos de robot para controlar el motor de accionamiento para realizar el movimiento y la acción del robot.Los robots industriales a menudo deben realizar trabajos de carga pesada, alta precisión y tienen requisitos extremadamente altos en los motores de accionamiento.L298N proporciona un poderoso soporte de potencia para robots industriales con su excelente capacidad de conducción y estabilidad.Ya sea que esté manejando, ensamblaje o inspección, L298N puede garantizar que los robots industriales completen las tareas de manera precisa y eficiente.
Inicio inteligente: en los sistemas de inicio inteligente, L298N se puede utilizar para controlar los motores de persianas, cortinas, puertas y otros equipos para lograr un control automatizado.Al combinarse con sensores, el equipo doméstico se puede ajustar automáticamente de acuerdo con la iluminación, la temperatura y otras condiciones.
Sistema de seguimiento solar: en los sistemas solares, L298N se puede utilizar para controlar el ángulo de inclinación de los paneles solares para implementar un sistema de seguimiento solar.A través del control de L298N, el sistema de seguimiento solar puede detectar los cambios de posición del sol en tiempo real y ajustar el ángulo de inclinación de los paneles solares en consecuencia.Este proceso de ajuste dinámico asegura que los paneles solares siempre mantengan el ángulo óptimo al sol, mejorando así la eficiencia de recolección de energía de los paneles solares.
Preguntas frecuentes [Preguntas frecuentes]
1. ¿Puede la velocidad de control de L298N?
El L298N es un controlador de motor H-Bridge dual que permite el control de velocidad y dirección de dos motores de CC al mismo tiempo.
2. ¿Por qué mi L298N no funciona?
Debe estar por encima de 4.5V para el funcionamiento correcto del L298.2. Perderá quizás 2.5V en el L298.Tal vez no queda suficiente voltaje para ejecutar el motor.
3. ¿Qué es el L298N?
El controlador del motor L298N es un controlador que utiliza un puente H para controlar fácilmente la dirección de los motores y PWM para controlar la velocidad.Este módulo le permite administrar de forma independiente dos motores de hasta 2A cada uno en ambas direcciones.El rango de suministro puede variar entre 5V y 35 V, suficiente para la mayoría de los proyectos de motor DC.
4. ¿Podemos conectar 4 motores a L298N?
La respuesta es sí y No. Depende de cómo use el controlador del motor L298N.El L298N diseñó originalmente para controlar dos motores de CC o un motor paso a paso.Pero, si no desea que cada motor gire hacia atrás, puede usar cada lado del controlador L298N para controlar dos motores de CC y un total de 4 motores.