Guía para usar PIC16F877A para proyectos de motor paso a paso
El microcontrolador PIC16F877A se usa ampliamente en muchos proyectos electrónicos porque ofrece un buen equilibrio de características y facilidad de uso.En esta guía, veremos de cerca el PIC16F877A, que cubre todo, desde sus modelos Pinout y CAD hasta su uso en el control de los motores paso a paso.Ya sea que esté creando un dispositivo simple o un proyecto de automatización complejo, comprender cómo conectar y controlar los motores utilizando este microcontrolador lo ayudará a obtener los mejores resultados.
Catalogar

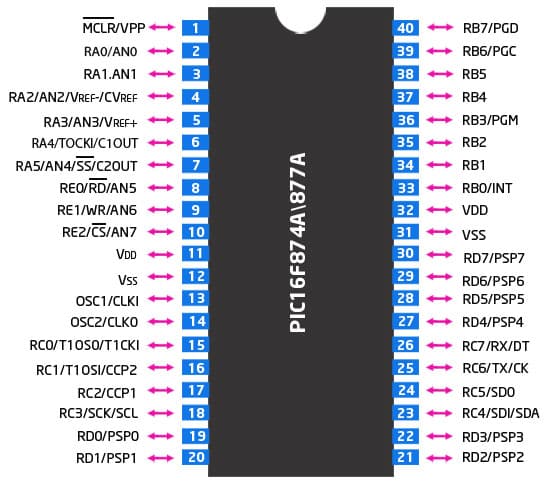
PIC16F877A Configuración de PIN
Modelos CAD para PIC16F877A
PIC16F877A Símbolo del diagrama
PIC16F877A PCB FUERTA

Modelo 3D
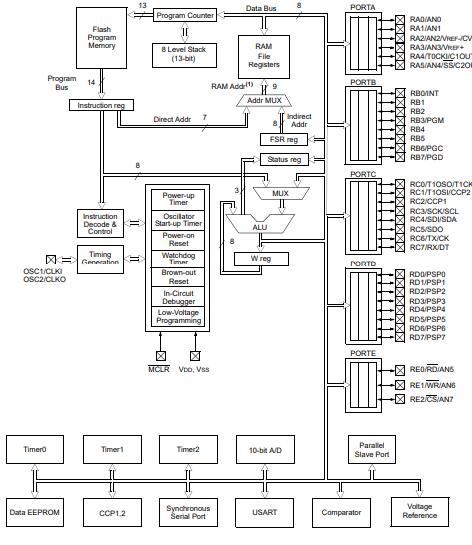
PIC16F877A Estructura interna
Especificaciones técnicas detalladas
| Tipo | Parámetro |
| Tiempo de entrega de fábrica | 7 semanas |
| Montar | A través del agujero |
| Tipo de montaje | A través del agujero |
| Paquete / estuche | 40 dip (0.600, 15.24 mm) |
| Número de alfileres | 40 |
| Convertidores de datos | A/D 8x10b |
| Número de E/S | 33 |
| Tiempos de vigilancia | Sí |
| Temperatura de funcionamiento | -40°C ~ 85°C TA |
| Embalaje | Tubo |
| Serie | Foto® 16f |
| Publicado | 1997 |
| Código JESD-609 | E3 |
| Código PBFree | Sí |
| Estatus de parte | Activo |
| Nivel de sensibilidad de humedad (MSL) | 1 (ilimitado) |
| Número de terminaciones | 40 |
| Código ECCN | EAR99 |
| Acabado terminal | Lata mate (sn) - recocido |
| Característica adicional | Opera a 4V de suministro mínimo |
| Posición terminal | DUAL |
| Voltaje de suministro | 5V |
| Frecuencia | 20MHz |
| Número de pieza base | Pic16f877a |
| Recuento de alfileres | 40 |
| Voltaje de suministro-Max (VSUP) | 5.5V |
| Fuente de alimentación | 5V |
| Minilla de voltaje de suministro (VSUP) | 4.5V |
| Interfaz | I2C, SPI, SSP, UART, USART |
| Tamaño de memoria | 14 kb |
| Tipo de oscilador | Externo |
| Corriente de suministro nominal | 1.6mA |
| Tamaño de la carnero | 368 x 8 |
| Voltaje - Suministro (VCC/VDD) | 4V ~ 5.5V |
| UPS/UCS/Tipo de ICS periférico | Microcontrolador, RISC |
| Procesador central | Foto |
| Periféricos | Detect/reinicio de Brown-Out, POR, PWM, WDT |
| Tipo de memoria del programa | DESTELLO |
| Tamaño de núcleo | De 8 bits |
| Tamaño de la memoria del programa | 14kb (8k x 14) |
| Conectividad | I2C, SPI, UART/USART |
| Tamaño de bit | 8 |
| Tiempo de acceso | 20 µs |
| Tiene ADC | Sí |
| Canales de DMA | No |
| Ancho de bus de datos | 8b |
| Número de temporizadores/contadores | 3 |
| Dirección del ancho del autobús | 8b |
| Densidad | 112 kb |
| Tamaño de la época | 256 x 8 |
| Familia CPU | Foto |
| Número de canales ADC | 8 |
| Número de canales PWM | 2 |
| Número de canales I2C | 1 |
| Altura | 4.06 mm |
| Longitud | 52.45 mm |
| Ancho | 14.22 mm |
| Llegar a SVHC | Sin SVHC |
| Endurecimiento por radiación | No |
| Estado de ROHS | ROHS3 Cumplante |
| Plomo libre | Plomo libre |
Comprender los motores paso a paso
Un motor paso a paso es un tipo de motor eléctrico que se mueve en pasos específicos en lugar de en movimiento continuo como los motores tradicionales.Estos movimientos paso a paso se miden en grados, que pueden variar según la aplicación.
Los motores paso a paso pueden funcionar en diferentes modos: unidad de olas, unidad completa y media unidad.Cada modo controla cómo se energizan las fases del motor, afectando su rendimiento y lo que lo hace adecuado para varios usos.
En el modo de accionamiento de olas, solo una fase del motor está alimentada a la vez.Este modo de control simple es útil para situaciones en las que se prioriza la eficiencia energética sobre el par, como en las tareas de automatización básicas donde se necesita una corriente de arranque mínima.
El modo de accionamiento completo alimenta dos fases simultáneamente.Esto da como resultado una mayor producción de torque, ya que dos bobinas funcionan juntas, lo que lo hace ideal para aplicaciones donde se necesitan precisión y resistencia, como en robótica y maquinaria CNC.
El modo de media unidad combina las características de las ondas y la unidad completa energizando alternativamente una fase y dos fases.Este enfoque proporciona tamaños de pasos más pequeños, duplicando efectivamente la resolución del motor.Half Drive es el más adecuado para aplicaciones como la impresión 3D y la instrumentación fina, donde el movimiento suave y el posicionamiento preciso son esenciales.
Al elegir un motor paso a paso para un uso específico, considere el entorno operativo.Para tareas de alta precisión, se recomienda el modo de media unidad para garantizar transiciones suaves y vibraciones reducidas.Para los proyectos centrados en el ahorro de energía, el modo de manejo de olas puede ser más apropiado.
Seleccionar el modo correcto requiere factores de equilibrio como torque, velocidad y complejidad del sistema.Elegir el modo correcto puede influir significativamente en el rendimiento del motor y la eficiencia general de su sistema.
Conectando un motor paso a paso con PIC16F877A
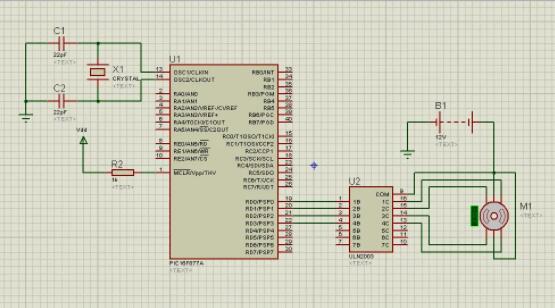
Para conectar un motor paso a paso con un Pic16f877a Microcontrolador, puede usar la matriz de transistores ULN2003.Este circuito integrado, diseñado para motores de alto torque, contiene siete pares de Darlington.Los bits PortD inferiores del microcontrolador están vinculados a los pines de entrada (1B, 2B, 3B, 4B) del ULN2003, mientras que sus pasadores de salida (1C, 2C, 3C, 4C) se conectan a las pines del motor paso a paso.Los pines comunes del motor y el pin COM de ULN2003 están conectados a una fuente de alimentación de 12V.
Los motores paso a paso se usan comúnmente para aplicaciones que requieren un control de movimiento preciso.Convierten pulsos digitales en rotación mecánica, lo que los hace ideales para dispositivos como máquinas CNC e impresoras 3D, donde la posición y la velocidad deben estar cuidadosamente reguladas.
El ULN2003 juega un papel clave en el control de los motores paso a paso debido a su capacidad para manejar la alta corriente y su fácil interfaz con los microcontroladores.Cuando se conectan al PIC16F877A, los bits de PortD inferiores se utilizan para controlar el motor paso a paso.Esta configuración proporciona un control de paso preciso, asegurando un movimiento y posicionamiento precisos.
El uso del ULN2003 en las configuraciones de control del motor es altamente confiable en las aplicaciones del mundo real.Ayuda a minimizar problemas como los pasos perdidos o el posicionamiento incorrecto, mejorando el rendimiento general.Mantenimiento y calibración regulares basados en datos de uso puede optimizar aún más la función del motor, asegurando la estabilidad a largo plazo y la operación precisa.
Ajustar la velocidad del motor paso a paso
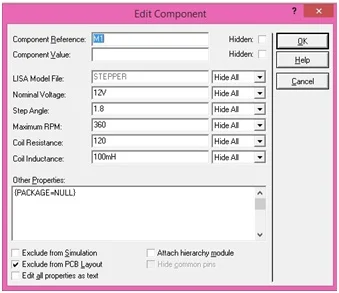
La velocidad del motor paso a paso se puede modificar con precisión utilizando el software de simulación Proteus.Al acceder a la configuración del motor a través de 'Editar propiedades', se pueden hacer ajustes a parámetros como el número de pasos y el ángulo de paso.Por ejemplo, un motor de 200 pasos divide una rotación completa (360 °) en 200 pasos, lo que hace que cada paso 1.8 °.Cambiar estas configuraciones en Proteus reflejará dinámicamente durante la simulación.
En la práctica, los motores paso a paso a menudo se emplean en industrias donde el control preciso del movimiento es crucial, como en la maquinaria y la robótica de CNC.Ajuste del ángulo de paso y el número de pasos ajustados el motor para lograr el movimiento exacto requerido para tareas específicas.
Alterar los parámetros del motor paso a paso afecta las características de rendimiento, como el par y la resolución.Por ejemplo, aumentar el número de pasos generalmente mejora la resolución, pero puede afectar el torque y el tiempo de respuesta.Comprender estas compensaciones a través de la simulación ayuda a tomar decisiones informadas.
Una perspectiva matizada revela que los ajustes iterativos, seguidos de pruebas prácticas, conducen a un diseño de motor más robusto.Asegurar que las simulaciones digitales reflejen de cerca los resultados del mundo real es crítico.Los matices de configurar un motor paso a paso se encuentran en el equilibrio entre la precisión teórica y la viabilidad práctica.
Programación de un motor paso a paso con PIC16F877A
Esta sección cubre cómo programar un motor paso a paso utilizando el microcontrolador PIC16F877A, explicando diferentes modos de conducción y proporcionando orientación práctica para una implementación efectiva.
Aquí hay un código de ejemplo básico para demostrar el control del motor paso a paso utilizando el modo de accionamiento completo:
void main ()
{
Trisd = 0b0000000000;// Establecer PortD como salida
Portd = 0b11111111;// Inicializar PortD
hacer
{
PortD = 0b00000011;// energiza dos fases simultáneamente
Delay_ms (500);// retraso de 0.5 segundos
Portd = 0b00000110;
Delay_ms (500);
Portd = 0b00001100;
Delay_ms (500);
Portd = 0b00001001;
Delay_ms (500);
} while (1);// bucle indefinidamente
}
En este código, el PortD PIC16F877A está configurado como un puerto de salida para controlar el motor paso a paso a través del controlador ULN2003.La secuencia de comandos energiza dos fases del motor paso a paso a la vez, que es característica del modo de accionamiento completo.Este modo mantiene el rotor en una posición fija con un par máximo, pero generalmente consume más potencia.
El modo de transmisión completo no es la única forma de controlar los motores paso a paso.Los modos de unidad de olas y medias unidad proporcionan alternativas basadas en requisitos específicos.El disco de onda energiza solo una fase a la vez, lo que reduce el consumo de energía pero da como resultado un par más bajo.La mitad de unidad alterna entre una y dos fases, ofreciendo una mayor resolución y un movimiento más suave.
Al programar motores paso a paso, elija el modo de conducción que mejor se adapte a sus necesidades, ya sea para posicionamiento preciso, eficiencia energética o torque máximo.
Aplicaciones prácticas de motores paso a paso
Los motores paso a paso se utilizan ampliamente en muchas industrias debido a su capacidad para proporcionar un control preciso y un rendimiento confiable.Su versatilidad los hace adecuados para todo, desde automóviles y electrodomésticos hasta máquinas industriales y dispositivos médicos.
En el mundo automotriz, los motores paso a paso juegan un papel clave en los sistemas de control como el acelerador, los faros y el aire acondicionado.Ayudan a ajustar estos componentes, asegurándose de que los vehículos funcionen sin problemas y eficientemente.Mientras tanto, en equipos de oficina como impresoras y fotocopiadores, los motores paso a paso manejan tareas como alimentación en papel y colocación de tinta.Esta precisión garantiza una calidad de impresión constante y una operación sin problemas con el tiempo.
En casa, los electrodomésticos como lavadoras y lavavajillas dependen de los motores paso a paso para controlar el flujo de agua y la rotación de tambores, asegurando que todo funcione sin problemas.En entornos industriales, los motores paso a paso son cruciales para operar máquinas CNC y brazos robóticos, donde proporcionan los movimientos exactos necesarios para la fabricación de alta precisión.
Los sistemas de seguridad también se benefician del movimiento confiable de los motores paso a paso.En dispositivos como cámaras de vigilancia y cerraduras automatizadas, los motores paso a paso permiten un posicionamiento suave y preciso, que es esencial para un monitoreo y seguridad efectivos.En la atención médica, los motores paso a paso se utilizan en dispositivos médicos como bombas de infusión y equipos de imágenes, donde ofrecen el control preciso necesario para una operación segura y precisa.
A medida que la tecnología continúa evolucionando, se espera que los motores paso a paso encuentren aún más aplicaciones en campos emergentes como robótica y vehículos autónomos.Su desarrollo continuo probablemente conducirá a una precisión y eficiencia aún mayor, ampliando su papel en varias industrias.
Piezas de microcontrolador comparables
| Número de parte | PIC16F877-I/P | PIC16F77-I/P | PIC16F74-I/P | PIC16F777-I/P |
| Fabricante | Tecnología de microchip | Tecnología de microchip | Tecnología de microchip | Tecnología de microchip |
| Paquete / estuche | 40 dip (0.600, 15.24 mm) | 40 dip (0.600, 15.24 mm) | 40 dip (0.600, 15.24 mm) | 40 dip (0.600, 15.24 mm) |
| Número de alfileres | 40 | 40 | 40 | 40 |
| Ancho de bus de datos | 8 B | 8 B | 8 B | 8 B |
| Número de E/S | 33 | 33 | 33 | 36 |
| Interfaz | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, UART, USART |
| Tamaño de memoria | 14 kb | 7 KB | 14 kb | 14 kb |
| Voltaje de suministro | 5 V | 5 V | 5 V | 5 V |
| Periféricos | Detect/reinicio de Brown-Out, POR, PWM, WDT | Detect/reinicio de Brown-Out, POR, PWM, WDT | Detect/reinicio de Brown-Out, POR, PWM, WDT | Detect/reinicio de Brown-Out, POR, PWM, WDT |
| Ver comparar | PIC16F877-I/P VS PIC16F77-I/P | PIC16F877-I/P VS PIC16F77-I/P | PIC16F877-I/P VS PIC16F74-I/P | PIC16F877-I/P VS PIC16F777-I/P |
Preguntas frecuentes [Preguntas frecuentes]
1. ¿Qué usa un motor paso a paso para generar movimiento mecánico?
Un motor paso a paso genera movimiento mecánico utilizando pulsos eléctricos.
2. ¿Qué hace un motor paso a paso?
Un motor paso a paso se mueve en pasos discretos.
3. ¿Cómo se miden los motores paso a paso?
Los motores paso a paso se miden en grados.
4. ¿Cuántos pasos toma un motor paso a paso?
Un motor paso a paso se mueve un paso a la vez.
5. ¿Cuántos modos de excitación tiene un motor paso a paso?
Un motor paso a paso tiene tres modos de excitación.
6. ¿Cuál es la forma más sencilla de conectar un motor paso a paso?
La forma más simple es conectarlo a un microcontrolador PIC16F877A.
7. ¿Cuántos pines de entrada del ULN2003 están conectados a los bits significativos más bajos del PORTD del microcontrolador?
Cuatro pines de entrada están conectados a los bits significativos más bajos del PortD del microcontrolador
Acerca de nosotros
ALLELCO LIMITED
Lee mas
Consulta rápida
Envíe una consulta, responderemos de inmediato.
¿Por qué elegir el chip de memoria ADESTO RM25C64DS-LTAI-B para su proyecto?
en 10/10/2024
PC817 OptoCoupler: funcionalidad y aplicaciones modernas
en 10/10/2024
Publicaciones populares
-
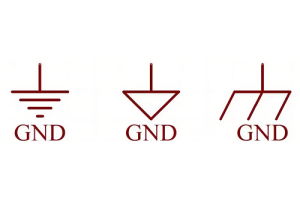
¿Qué es GND en el circuito?
en 01/01/1970 2838
-

Guía del conector RJ-45: códigos de color del conector RJ-45, esquemas de cableado, aplicaciones R-J45, hojas de datos RJ-45
en 01/01/1970 2410
-

Tipos de conector de fibra: SC vs LC y LC vs MTP
en 01/01/1970 2023
-
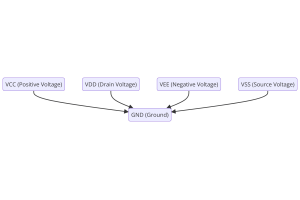
Comprensión de los voltajes de la fuente de alimentación en Electronics VCC, VDD, VEE, VSS y GND
en 05/11/0400 1768
-

Comparación entre DB9 y RS232
en 01/01/1970 1730
-

¿Qué es una batería LR44?
La electricidad, esa fuerza ubicua, impregna en silencio todos los aspectos de nuestra vida diaria, desde dispositivos triviales hasta equipos médicos potencialmente mortales, juega un papel silencioso.Sin embargo, realmente comprender esta energía, especialmente cómo almacenarla y producirla de manera eficiente, no es una tarea fácil.Es en este fondo que este artículo se centrará en un tipo...en 01/01/1970 1681
-
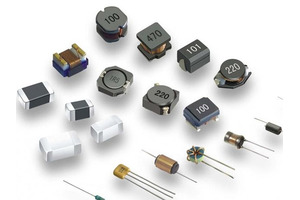
Comprender los fundamentos: resistencia a la inductancia y capacidad
En la intrincada danza de la ingeniería eléctrica, un trío de elementos fundamentales toma el centro del escenario: inductancia, resistencia y capacitancia.Cada uno tiene rasgos únicos que dictan los ritmos dinámicos de los circuitos electrónicos.Aquí, nos embarcamos en un viaje para descifrar las complejidades de estos componentes, para descubrir sus distintos roles y usos prácticos dentr...en 01/01/1970 1628
-

Guía integral de batería CR2430: especificaciones, aplicaciones y comparación con las baterías CR2032
¿Qué es la batería CR2430?Beneficios de las baterías CR2430NormaAplicaciones de batería CR2430CR2430 equivalenteCR2430 vs CR2032Batería CR2430 TamañoQué buscar al comprar el CR2430 y los equivalentesHoja de datos pdfPreguntas frecuentes Las baterías son el corazón de pequeños dispositivos electrónicos.Entre los muchos tipos disponibles, las células de monedas juegan un papel crucial, ...en 01/01/1970 1497
-

CR2450 vs CR2032: ¿Se puede usar la batería en su lugar?
Las baterías de manganeso de litio tienen algunas similitudes con otras baterías de litio.La alta densidad de energía y la larga vida útil son las características que tienen en común.Este tipo de batería ha ganado la confianza y el favor de muchos consumidores debido a su seguridad única.¿Gadgets tecnológicos caros?¿Pequeños electrodomésticos en nuestros hogares?Mira a tu alrededor y ...en 01/01/1970 1471
-
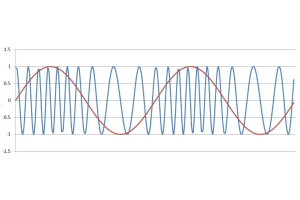
¿Qué es RF y por qué lo usamos?
La tecnología de radiofrecuencia (RF) es una parte clave de la comunicación inalámbrica moderna, lo que permite la transmisión de datos a largas distancias sin conexiones físicas.Este artículo profundiza en los conceptos básicos de RF, explicando cómo la radiación electromagnética (EMR) hace posible la comunicación de RF.Exploraremos los principios de EMR, la creación y el control de l...en 01/01/1970 1455
Número de pieza caliente
-

LTC3859AEFE#PBF
Analog Devices Inc.
IC REG CTRLR MULT TOP 38TSSOP
AD534TD
Analog Devices Inc.
IC PREC MULTIPLIER 14-CDIP
CL03C220JA3ANNC
Samsung Electro-Mechanics
CAP CER 22PF 25V C0G/NP0 0201
RT9526AGE
Richtek USA Inc.
IC BATT CHG LI-ION 1CELL SOT23-6
PTH03010WAH
Artesyn Embedded Power
DC DC CONVERTER 0.8-2.5V 37W
DF1BZ-8P-2.5DSA
Hirose Electric Co Ltd
CONN HEADER VERT 8POS 2.5MM
BC858BW
Diotec Semiconductor
BJT SOT-323 30V 100MA
CGA6L2NP01H333J160AA
TDK Corporation
CAP CER 0.033UF 50V NP0 1210
2SK2158-T2B-A
Renesas Electronics America Inc
SMALL SIGNAL N-CHANNEL MOSFET
GBU2508
Yangzhou Yangjie Electronic Technology Co.,Ltd
RECT BRIDGE 800V 25A GBU
INA126U
Texas Instruments
IC INST AMP 1 CIRCUIT 8SOIC
5KP48CA
Diotec Semiconductor
TVS D8X7.5 48V 5000W BI
FDFS2P753Z
onsemi
POWER FIELD-EFFECT TRANSISTOR, 3
12067C153KAT2A
KYOCERA AVX
CAP CER 0.015UF 500V X7R 1206
2N689
Solid State Inc.
TO 48 25 AMP SCR
ADS8557IPM
Texas Instruments
IC ADC 14BIT SAR 64LQFP
SRF1006-302Y
Bourns Inc.
CMC 3MH 350MA 2LN 3KOHM SMD
NL17SV04XV5T2G
onsemi
IC INVERTER 1CH 1-INP SOT553 -
AC1210JKNPOBBN102
YAGEO
CAP CER 1000PF 500V C0G/NPO 1210
CDCE421ARGET
Texas Instruments
IC CLOCK GENERATOR 24VQFN
BZY93C22
Solid State Inc.
DO4 20 WATT ZENER DIODES
VE-263-EV
Vicor Corporation
DC DC CONVERTER 24V 150W
SM5S28ATHE3/I
Vishay General Semiconductor - Diodes Division
TVS DIODE 28VWM 45.4VC DO218AC
Z0103MNT1G
Littelfuse Inc.
TRIAC SENS GATE 600V 1A SOT223
VHFD37-12IO1
IXYS
RECT BRIDGE 1PH 1200V V1A-PAK
DG390ACWE
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 2 50OHM 16SOIC
PC817X1NSZ0F
SHARP/Socle Technology
OPTOISOLATOR 5KV TRANS 4DIP
ACS722LLCTR-10AU-T
Allegro MicroSystems
SENSOR CURRENT HALL 10A DC
1N5227B
NTE Electronics, Inc
DIODE ZENER 3.6V 500MW
H12D4825-10
Sensata-Crydom
SSR RELAY SPST-NO 25A 48-530V
SN74LVC16T245DGVR
Texas Instruments
IC TRANSLATOR BIDIR 48TVSOP
IDT71V124SA10TY
Renesas Electronics America Inc
IC SRAM 1MBIT PARALLEL 32SOJ
BZB984-C15,115
Nexperia USA Inc.
DIODE ZENER ARRAY 15V SOT663
0437005.WR
Littelfuse Inc.
FUSE BRD MNT 5A 32VAC 35VDC 1206
TLE2425CDRG4
Texas Instruments
IC VREF GND REF 2.5V 8SOIC
CSD58882Q5A
Texas Instruments
PROTOTYPE -
S-1313A33-A4T1U3
ABLIC Inc.
IC REG LINEAR 3.3V 200MA HSNT4-A
LM1086CT-ADJ
Texas Instruments
IC REG LINEAR ADJ POS LDO REG
ATL431BQDBZR
Texas Instruments
IC VREF SHUNT ADJ 0.5% SOT23-3
AD9562JP
Analog Devices Inc.
HI SPD IC PWM
BZM55C15-TR
Vishay General Semiconductor - Diodes Division
DIODE ZENER 15V 500MW MICROMELF
BC856BS
Yangjie Technology
SOT-363 PNP+PNP 0.2W -0.1A -80V
BQ2085DBT-V1P3
Texas Instruments
IC GAS GAUGE FOR BQ29311 38TSSOP
EGPD250ELL202MK20H
United Chemi-Con
CAP ALUM 2000UF 20% 25V RADIAL
TISP4180L3AJR-S
Bourns Inc.
THYRISTOR 145V 100A DO214AC
12061A392F3T4A
AVX Corporation
CAP CER 3900PF 100V NP0 1206
TL317CPWRG4
Texas Instruments
IC REG LIN POS ADJ 100MA 8TSSOP
8532-32L
API Delevan Inc.
FIXED IND 390UH 680MA 770MOHM SM
BFCN-8000+
Mini-Circuits
LTCC BAND PASS FILTER, 7900 - 81
AD9200JRSZ
Analog Devices Inc.
IC ADC 10BIT PIPELINED 28SSOP
R1LV5256ESA-5SI#S1
Renesas Electronics America Inc
IC SRAM 256KBIT PAR 28TSOP I
SY10E101JC
Microchip Technology
IC GATE OR/NO QUAD 4INPUT 28PLCC
TPS63024YFFT
Texas Instruments
IC REG BCK BST ADJ 2.12A 20DSBGA
AD80241BBCZ
Analog Devices Inc.
IC OPAMP GP 1 CIRCUIT